AI in Robotics & Autonomous Systems
At the intersection of AI and robotics, our research delves into the capabilities of mechanical systems. We're passionate about harnessing the potential of robotics to revolutionize everyday experiences and industries. With a focus on real-time adaptability, we're ensuring robots can swiftly respond and adjust to varied environments.
Safety and clarity in decision-making remain at the heart of our work. Beyond just movement, we're exploring robots' ability to interpret complex surroundings and autonomously map environments. Robotics holds the promise of transforming sectors from healthcare to logistics, and our grounded, collaborative approach aims to contribute meaningfully to this transformative journey.
Our progress in robotics and AI is fueled by collaborative efforts. We've built bridges between several key departments: Mechanical and Process Engineering (D-MAVT), Information Technology and Electrical Engineering (D-ITET), Computer Science (D-INFK), Health Sciences and Technology (D-HEST), and Civil, Environmental and Geomatic Engineering (D-BAUG). Beyond ETH, we have collaborations with Professors from UZH and HSG. Together, we're pooling our knowledge and resources to advance the field in practical, meaningful ways.

Research topics include
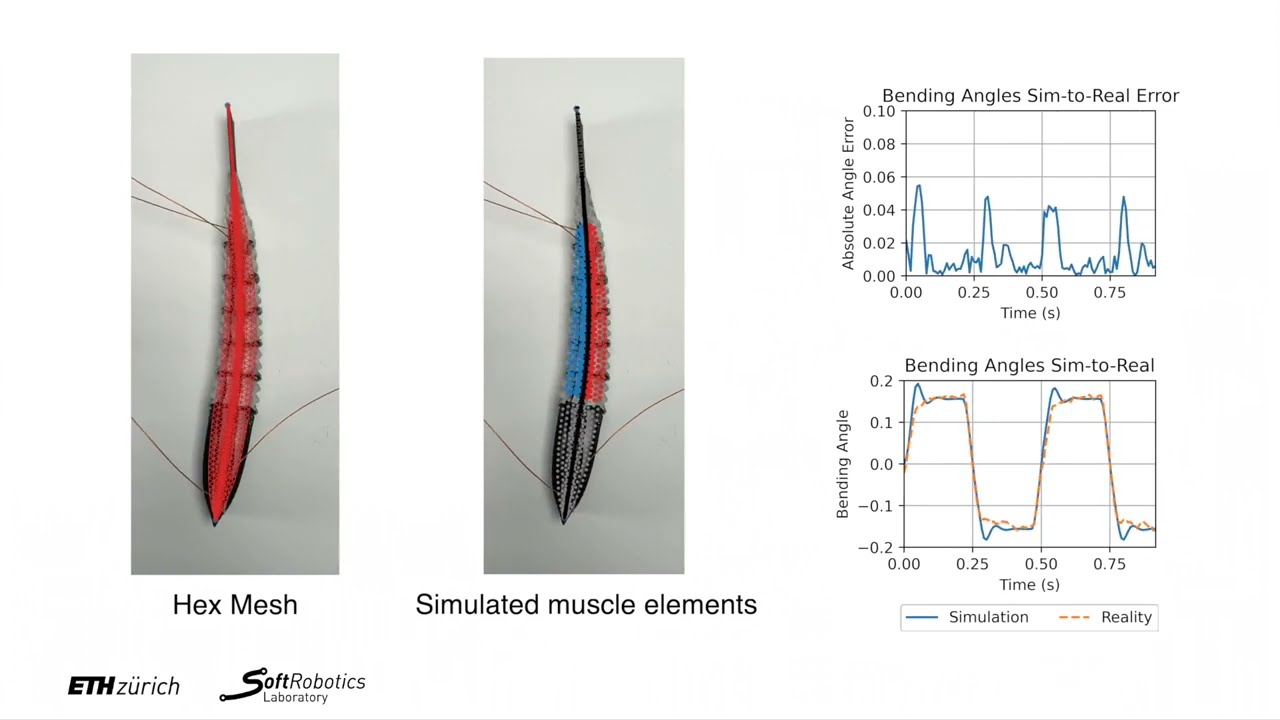
- Robotics, Autonomous Systems, Soft Robotics
- Robotic Manipulation and Locomotion
- Human-Robot Interactions
- Deep Reinforcement Learning
- Control Systems
- Wearable Robotics and Sensors
- Rehabilitation Robotics
- Robotic Vision and Perception, Haptic Feedback Systems
- Robustness and Safety